For human beings, gestures have always been a common form of communication, even before the evolution of language. The latest advancements in the fields of computer vision, image processing, and pattern recognition have paved the way for real-time vision-based hand gesture recognition to be feasible
.1. Introduction
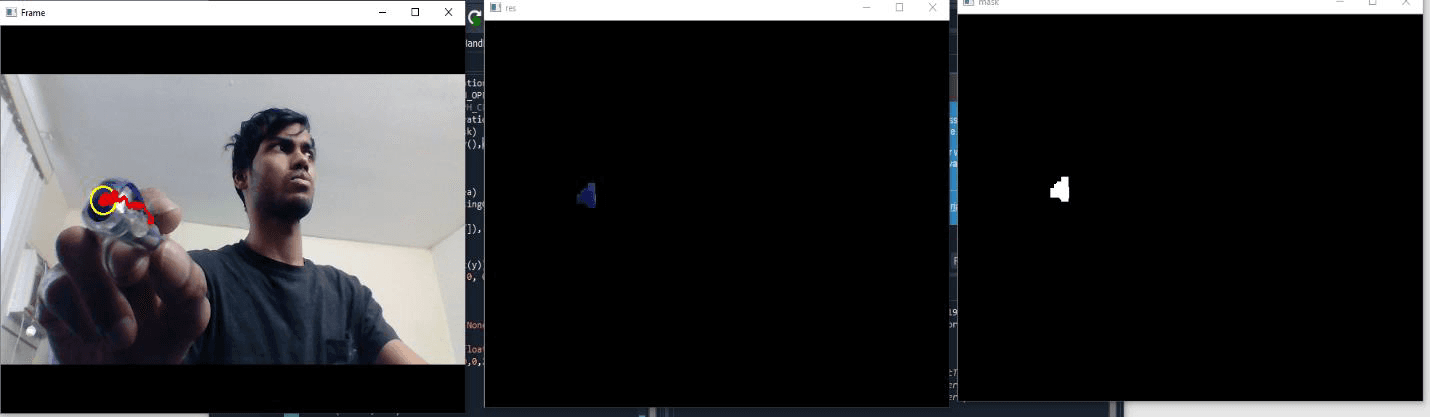
In this project, hand gestures captured by a webcam are utilized for intuitive human-computer interaction. A Skin Color Histogram approach is employed, allowing the creation of a segmented hand image to differentiate it from the background. Moreover, the histogram tends to have greater accuracy and takes into account the current light conditions. The result shows that this system can operate well, enabling interaction with a computer using hand gestures and eliminating the need for external sensors.
Tools and Libraries Used:
OpenCV (cv2):
Role: Computer vision library.
Functions: Video frame capture (
cv2.VideoCapture()), color space conversion (cv2.cvtcolor()), morphological operations (cv2.erode(),cv2.dilate()), contour finding (cv2.findContours()).Significance: Crucial for image and video processing tasks.
NumPy:
Role: Numerical computing library.
Functions: Array manipulation, mathematical operations.
Significance: Enhances efficiency in array handling and calculations.
Matplotlib:
Role: Plotting library.
Functions: Image display (
matplotlib.pyplot.imshow()), result visualization.Significance: Facilitates data visualization.
4. Challenges
One of the challenges faced in detecting fingers was differentiating a hand from the background and identifying the tip of a finger.